Rykoff2014RedMaPPerAlgorithmSDSS
涉及算法细节的章节是 sec3~sec9
“自训练”的意思就是算法包括很多的参数,然后根据最后的结果调整这些参数,就像 R09 里面的 richness-radius 关系的参数:有点类似一个可解释的算法加上一点机器学习的优化?
Comment #
- 第三节给出了整体的 outline
- 用星系样本得到 red sequence 作为红移的函数,然后用 red sequence 识别图像中的 cluster
- 总之最后的结果就是 detect 到一些 cluster,副产品是一个作为红移的函数的 red sequence
- 很经常地使用迭代方法,但是迭代是否有效、最后能否收敛其实都是很脆弱的问题
- 本质上来说是一个统计信息处理和提取的过程,难道没有更优雅的方法吗?
- 这里 section 的顺序到底是按照什么来的?感觉逻辑很混乱
- sec3~9 应该合并到一起,作为算法原理
- 应该是 sec6 和 sec9 放在最前面,然后 4,5,7,8 作为这两节的 sub-section
- 作者的逻辑可能是 4/5 作为 6 的准备工作,7/8 作为 9 的准备工作
Abs #
- 一个 red sequence cluster finder,优点包括
- self-training
- 处理不同深度的 mask
- 以概率形式给出红移
- 以概率形式给出 BCG
- 应用在 10000 平方度的 SDSS DR8 上面,得到了 0.08~0.55 红移上的 25000 个 cluster 的目录
- 红移的中位误差在 0.02 左右
1 Intro #
主题是 photometric cluster finding
用星系团研究 DE: DES, Pan-STARRS, HSC, LSST
- 对于多波段数据,可以用算法研究角位置、颜色、红移空间中的 clustering, 算法包括两类
- 基于光度红移
- 基于 cluster red sequence
- new photometric cluster finding algorithm 的必要性
- 一致性问题
- 对于 photo-z, faint end 的误差会极大增加,因为没有很好的训练样本
- 对于 red sequence,4000A break 的位置会随着红移变化,所以需要用不同的颜色来描述 red sequence 中统一的红色
- 算法应该具有 self training 的能力,因为先验参数的设置可能会导致系统误差
- numerical efficiency
- survey mask
- 这里的 random point 指的是 mock?
- 为每一个 cluster 生成红移的概率分布,以及 cluster 中心位置的概率分布
- 最小化 richness-mass 关系的 scatter
- 在 R09 和 R12 中进行了探索,哪些改进是有效的,而哪些是不重要的
- 为每一个星系估计 BCG 概率是重要的,而 hard color cut 是不好的
- 在 R09 和 R12 中进行了探索,哪些改进是有效的,而哪些是不重要的
- 一致性问题
- 我们提出了 red-sequence Matched-filter Probabilistic Percolation (redMaPPer)
- 满足以上的要求(具体描述在 2012 年的文章中)
- 一个 personal bias 是:based on red-sequence,而不使用 photo-z
- 二者的区别是使用颜色来确定视线方向上的 clustering,而不是直接使用红移空间
- redMaPPer 也可以用于在红移空间中使用
- 两种方法的对比
- 我们不相信 photo-z 在 faint 环境下的效果,因为缺乏训练的样本
- cluster 中的星系是特殊的,用整个 galaxy population 推测红移是不合理的
- 过去的比较没有证明 red sequence 方法和 photo-z 哪个是更好的
- 在足够高的红移下,red sequence 消失,只能使用 phot-z 方法
- redMaPPer 也需要光谱 sample,但是不需要局部有代表性的样本,可以是各个红移上最亮的星系
- 二者的区别是使用颜色来确定视线方向上的 clustering,而不是直接使用红移空间
- 只需要 photometric galaxy catalog multi-band 覆盖了对应红移的 4000A break
- This work 介绍了将 redMaPPer 应用于 SDSS DR8 的结果作为示例
- 这里提到了 cosmology 的设置:h=1.0 means 全部距离都带有 $h^{-1}\ \mathrm{Mpc}$ 的单位
2 Data #
2011 年的 DR8 数据,覆盖了 14000 平方度
这里使用的星系 catalog 范围和 BOSS 一致(10500 平方度),bad/bright mask 也来自于 BOSS
- BOSS 提供的 bright star mask 基于 Tycho catalog,是不完全的
- 和 Yale bright star catalog 对比,有 70/9000 的亮恒星是不在其中的
- 对 63 个 NGC 天体和以上 70 个亮恒星进行了 mask,除去了 36 平方度的面积
- redMaPPer 需要非常干净的 galaxy catalog,所以需要严格筛选
- 这里的策略和 Sheldon12 类似
- 用 SDSS 默认策略进行 star/galaxy separation
- 限制 i 波段星等比 21 更亮
- 剔除具有 SATUR CENTER, BRIGHT, TOO MANY PEAKS, (NOT BLENDED OR NODEBLEND) 的对象
- 保留了 SATURATED, NOT CHECKED, and PEAK CENTER 的对象
- 因为 cluster 中心可能会错误地带有这类标签
- 采用 i-band CMODEL MAG 作为 mag 的描述,但是采用 MODEL MAG 计算颜色
- 最后进行 extinction correction
需要使用光谱数据来校准 red sequence(但是算法是可以自训练的)并且验证测光红移
使用 SDSS DR9 光谱,20% 用于训练,80% 用于验证
3 Algorithm #
核心参数是:optimized richness estimator $\lambda$
- 算法分为两个阶段
- 校准阶段:校准 red sequence 作为红移的参数(其实是得到颜色作为红移的函数 $c(z)$?)
- finder 阶段:利用校准后的 red sequence(其实就是颜色-红移关系)识别 cluster 以及测量 richness
- 两个阶段互相迭代
- 最初的 cluster 来源于 color cut
- 最初的 red sequence 来源于一批具有光谱红移的 cluster 中心星系
- 用 cluster catalog 校准 red sequence, 用 red sequence 进行新的 cluster finding
- 用 cluster 确定 red sequence 的 calibration 过程也是迭代的
- 在 sec6 中详细介绍
- 首先用具有光谱红移的 training clusters 进行校准
- 也就是得到 $c(z)$ 关系
- 在 maxBCG 中使用的是 SDSS LRG
- 对于训练集的要求是:每 0.05 红移区间有 40 个具有光谱数据的 cluster
- 对于 SDSS 能够满足,但是未来的高红移巡天(比如 DES)不一定可以满足
- 对于 this work
- 首先从光谱星系中选出一些红色的样本作为 seed, 寻找周围区域的相同颜色星系的 overdensity
- 通过这种方式将已知的光谱红移扩展到成员星系上,之后可以更精确地确定 red sequence
- 然后将这些 over-density 视作 cluster 进行 red-sequence 的拟合
- 这里包含了 tilt,也就是颜色和光度不是独立的
- 上面两步包含在 sec6 中
- 基于 red-sequence model 进行 cluster finding (sec9)
- 将每一个星系假设为 cluster 中心
- 用 red sequence 计算星系的测光红移 $z_\mathrm{red}$(sec7.1)作为红移的 initial guess
- 基于红移计算 richness $\lambda$ 以及 likelihood(sec4)
- 对 cluster member 和红移进行迭代的优化(sec7.2)
- 根据 likelihood 对 cluster 进行排序,对于排序较高的 cluster 的周围 neighbor 进行 mask,这一过程称为 percolation(sec9.3),可以避免重复计数
- 首先从光谱星系中选出一些红色的样本作为 seed, 寻找周围区域的相同颜色星系的 overdensity
4 Richness estimator #
基本和 R09 相同,相比 R12 从 single-color 变成了 multi-color
最基本的想法是对于给定的星系属性,观测到的投影分布是 cluster member 和 background 的相加,richness 应该满足
- 其实这个方程的本质就是:为测量到的 galaxy count 乘一个因子得到真正的 cluster member 数量,这个因子由 source 强度和 bkg 强度的比值决定
- 需要定义半径和光度的 cutoff, 这里 $R_c$ 由 radius-richness 关系给出,光度的截断定义为 $0.2L_\star$
- radius-richness 关系中有两个参数 $R_0$ 和 $\beta$,采用 R09 中的最佳参数(这里从 $\alpha$ 改成 $\beta$ 是为了和下面 luminosity function 中的参数作区分)
- 通过数值方法可以直接求解以上方程得到 richness(这一步应该属于 finder 过程),此外还可以得到一个半径的估计 $R_c$
- 星系的性质 $\mathbf{x}$ 包括到星系团中心的距离、星等、颜色(三个波段)
- 这里的颜色被压缩到一个 $\chi^2$ 变量中,用于描述 red sequence 的拟合 goodness,或者说是这个星系和模板之间的差距,详情见下面的 color filter 章节
- 星等分布用 Schechter function 描述,这里参数 $\alpha$ 取值为 1,$m_\star$ 用一个复杂的多项式表示
- 在未来的 redMaPPer 中,使用 data 的测量值替代这些先验决定的参数
Color filter #
这里关于颜色的 filter function 不再是 Gaussian 形式,而是用 $\chi^2$ 分布来表征
- 理论 red sequence 模型可以用 $\mathbf{c}(z,m_i)$ 表示,也就是给定红移和星等存在一个唯一的颜色向量
- 这里考虑了 red sequence 的斜率
- 用一个协方差矩阵描述离散度
- 因为颜色包含多个分量
- 仅和红移有关,和星等无关
- 对于一个实际的星系来说,$\chi^2$ 的计算方式为 $\chi^2(z) = (\mathbf{c} - \langle \mathbf{c} | z, m_i \rangle) \left(\mathbf{C}{\mathrm{int}}(z) + \mathbf{C}{\mathrm{err}} \right)^{-1} (\mathbf{c} - \langle \mathbf{c} | z, m_i \rangle)$
- 这里误差包含 intrinsic 的以及测光的误差
- 如果星系是 cluster 成员,上面的 $\chi^2$ 应该服从 $\chi^2$ 分布
- 自由度 $\nu$ 为颜色的数量
Background #
假设背景是空间位置无关的,仅取决于星等、颜色和红移(颜色用 $\chi^2$ 描述)
5 Mask/Different Depth #
这一章在逻辑顺序上不是应该在最后吗?
两个限制因素:
- 在不同的区域上具有不同的 depth
- 也就是因为深度不足导致没有发现 cluster
- 存在一些因为 bright star 导致的 mask
估计由于以上因素导致的缺少的 cluster richness 比例,然后进行修正
5.1 Correction term #
将星系参数空间划分为无穷小的 pixel(用 $N_i$ 表示)就可以得到
然后拆分为 in 和 out 两部分
前者是实际的观测值,而后者是修正项 $C$
6 Calibration stage #
6.0 Summary #
- iteration 0
- 从 SDSS 的光谱星系中选出一些红色的光谱星系
- 计算颜色-红移关系
- iteration 1
- 以星系样本和颜色-红移关系为基础,进行周围成员星系的搜寻并且估计 richness(单色)
- 用这些星系作为样本得到 red sequence 的第一次估计
- iteration n
- 运行 finder 然后再重新计算 red sequence model(在 sec9 中描述)
- 继续进行迭代,得到 cluster catalog 以及 multi-color membership
- 在后续迭代的过程中,使用 multi-color 代替第一次迭代中用到的 single color
这里其实包括了整个过程,只不过把基于 red sequence 运行 finder 的过程打包放到 sec9 了
6.1 Outline #
这里对应于第一个阶段也就是 calibration: 从已知红移的 cluster 目录得到 red sequence
这里 cluster 的作用是将中心星系的光谱红移扩展到周围的 member galaxy 上
- 如果有一个已知光谱红移的星系样本,就可以从中拟合出颜色-红移关系
- 但是存在限制条件:暗端的星系数据不完全,在校正 red sequence 的斜率上存在困难(很需要这个 tilt 吗?)
- 一个解决办法是 cluster 将成员星系和中心星系的红移联系起来,只需要一个已知光谱红移的 cluster catalog
- member galaxy 可能没有光谱数据,但是可以通过 cluster 的性质确定其红移
- 可以通过 X-ray 或者 SZ catalog 获得,或者用 redMaPPer 先找一些 cluster 出来,然后对其中心进行光谱观测
- This work 中我们用现有的光谱星系作为 seed,先进行 cluster 的搜寻(通过寻找类似颜色的星系的 over-density),然后进行 red sequence 或者说颜色-红移关系的确定
- 这些光谱星系一定是 BCG 吗?一定是 cluster member 吗?
6.2 Selecting Seed Galaxies and the Initial Color Model #
calibration 的第一步是从 SDSS 光谱星系中选出作为 seed 的红色星系,这可以通过颜色 cut 来实现(在 0.35 以下用 g-r, 在 0.35 以上用 r-i,以保证跨越 4000A break)
筛选步骤具体来说是
- 首先把星系按照红移分组(宽度是 0.05)
- 在程序里面使用的是 0.1
- 然后估计 red sequence 的颜色平均值和 intrinsic scatter(使用 Gaussian Mixture Method),位于平均值附近 2sigma 以内的星系被认为是红星系
- 对于这些筛选出来的红色星系,计算颜色-红移关系作为对初始关系的校正
- 其实有点像 sigma clip
- 用 spline interpolation 进行拟合
- 估计 color-redshift 关系的 width,作为对初始 scatter 估计的校正
- 用更新之后的 mean 和 width 进行再一轮的筛选,筛选标准是 2sigma 以内
这里没有提到颜色和光度的关系
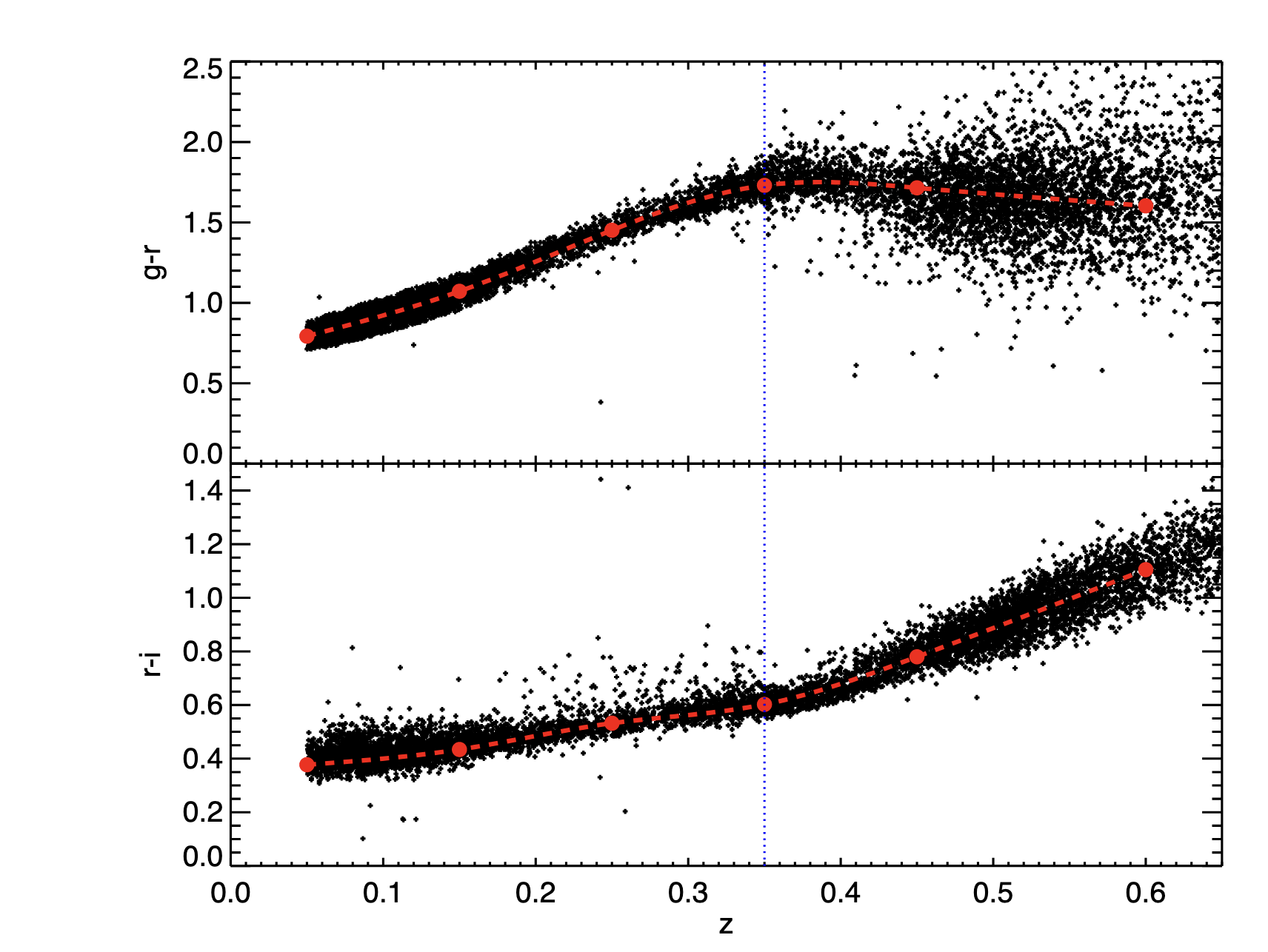
这里可以看出红移高于 0.35 之后,g-r 颜色不再变得更红,说明 4000A break 已经越过了 g-r 的窗口?
6.3 Single color member selection #
以上得到了 seed galaxy sample 和初步的 color-z 关系,下面用 single-color 进行周围 member galaxy 的筛选(仅在第一次迭代中使用 single color)
需要注意的是使用 galaxy color 可能在高红移带来噪声,所以这里以颜色-红移模型中的颜色作为 color box 的基准
对于一个 seed:
- 选取所有位于 seed 周围 $500h^{-1}$ kpc 之内、并且颜色不显著偏离模型颜色 $2\sigma$ 的星系(这里 $\sigma$ 用的是固定值?)
- 这里的 aperture 是固定的
- 以这些星系为样本对 red sequence 进行拟合
- 这里的拟合是为了之后计算 richness 吗?
- 测量 single-color cluster richness $\lambda$
- 对于 richness 超过 10 的 cluster,将光谱星系的红移赋予周围 membership 大于 0.7 的星系
- 这样就得到了更大的具有红移的星系样本
- 虽然这个样本是存在污染的(membership 低于 1),但是其污染程度可以被估计
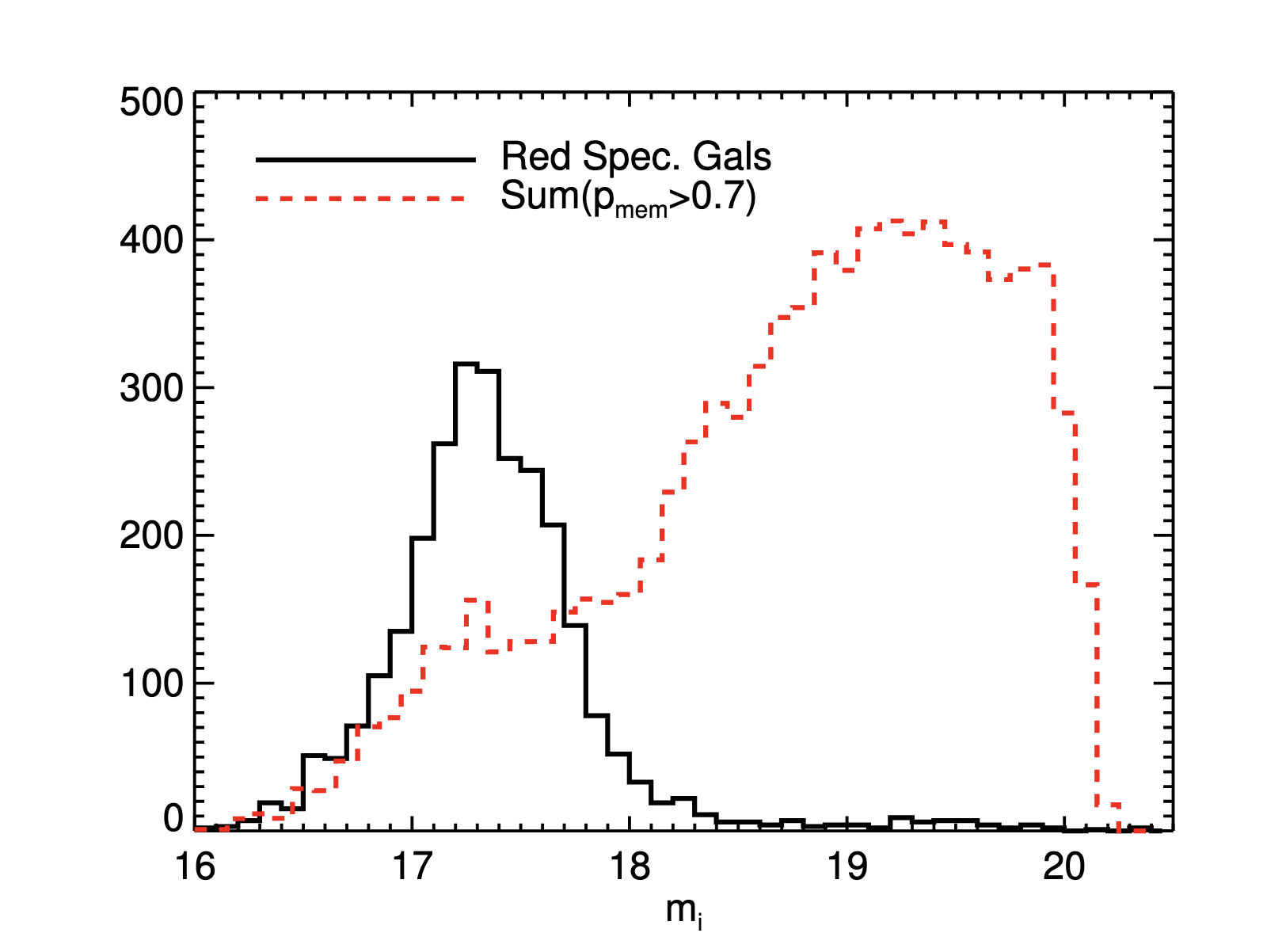
初始的 seed (42000) 几乎都是较亮的星系,而最后的样本(600,000)中具有更暗的星系。这种向 fainter end 的延伸是依靠对 cluster member 红移的传播实现的。
6.4 Modeling the red sequence #
上面用分配红移的方法给一些没有光谱红移的成员星系分配了红移
虽然计算 cluster richness 的时候校准过一遍 red sequence,但是这里用新的星系样本进行再一次校准
- red sequence 模型由星等-颜色关系来描述
- 这个关系同时也是红移的函数
- 除此之外还有 multi-color 对应的协方差矩阵,与单色情况下的 red sequence intrinsic scatter 对应
- 具有很多的自由参数,警惕过拟合
- 每次用一种颜色对红移进行校准,之后再拟合协方差矩阵的非对角元素
- 为了减弱 blue cluster galaxy 的影响,在拟合之前进行一次 color cut
- 作为弥补需要用截断的 Gaussian 来进行概率计算
6.4.1 Measuring the Model Mean and Color Scatter #
- 拟合的目标是 $\langle c|m,z\rangle$,也就是给定红移和星等处的平均颜色
- 首先找到一个中位星等作为 pivot point,然后校准某个红移处 red sequence 的斜率和截距
- 通过一定的颜色 cut 来避免蓝星系的影响
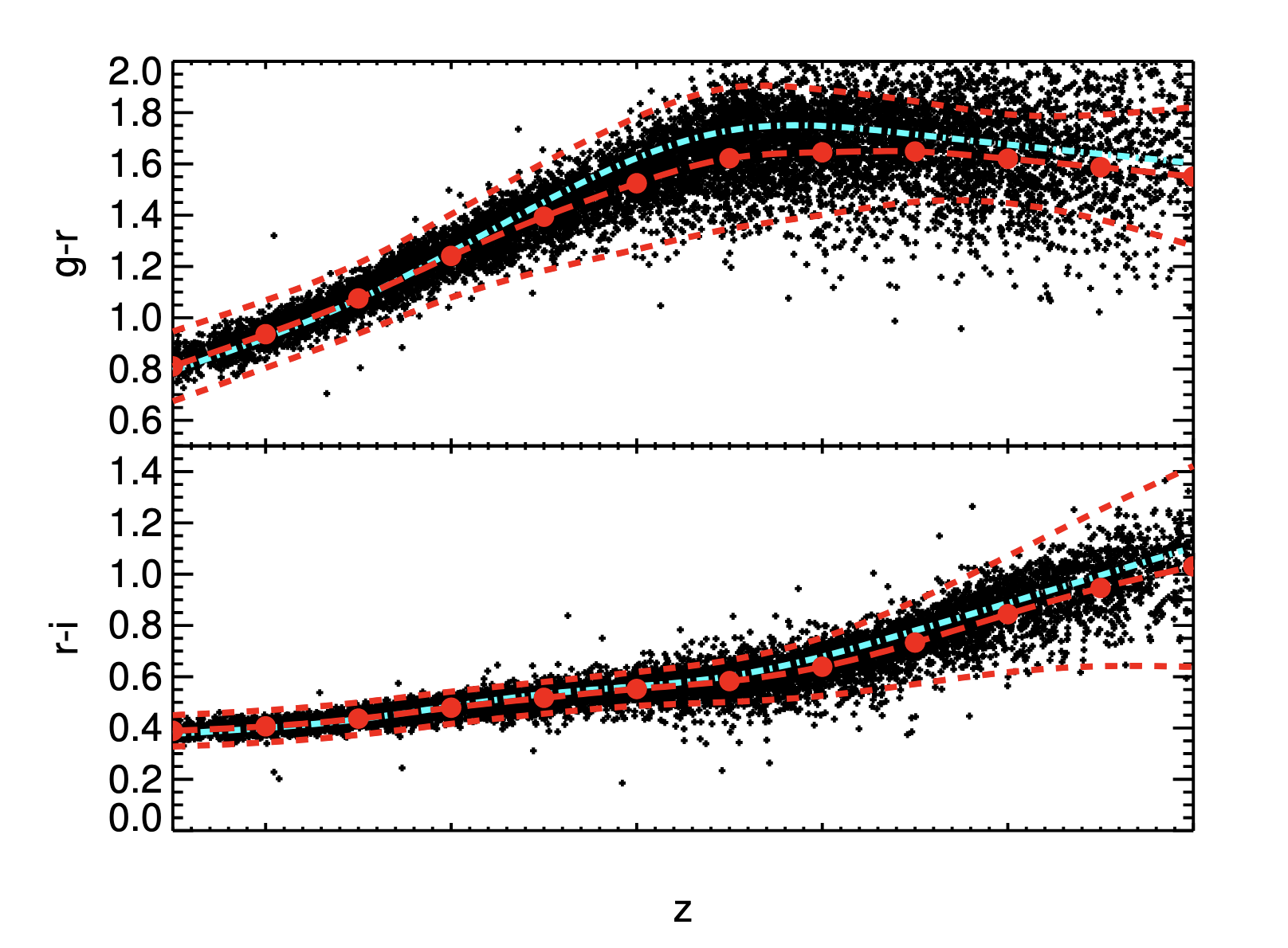
- 最后还计算了单一颜色对应的 scatter,用 $C_{jj}^{\mathrm{int}}(z)$ 表示
- 最后得到了更加精确的红移-颜色关系,如下图所示
6.4.2 Covariance matrix #
这个 section 的目标是计算协方差矩阵的非对角元素
- 每次计算两种颜色对应的矩阵元素
- 通过为不同颜色设定优先级顺序来保证矩阵的正定性质
- 协方差矩阵包括 intrinsic 和 photometric 两部分
- 前者仅包含一个 band 之间的相关系数 $r$ 作为未知数
- 对两种颜色之间的相关系数 $r$ 进行一些先验的限制,具体来说是 $\pm0.45$
- 后者由测光本身的性质给出,其协方差系数来自于颜色计算的共享波段,比如 g-r 和 r-i 中共同的 r
- 前者仅包含一个 band 之间的相关系数 $r$ 作为未知数
6.5 Iterating the red-sequence model #
将 membership probability 和 red-sequence model 进行迭代的更新直至收敛,因为二者是互相依赖的
- 在得到 red sequence 参数之后,在测试数据集上运行 cluster finder
- 仅限于 seed 相关的星系团
- 最终得到了一个新的列表以及 multi-color 的 membership
- 然后重新估计 red sequence
- 对以上过程进行迭代
- 主要的提升来源于从单色到多色的转变
- 在多次迭代过程中,平均颜色以及斜率都会很快收敛(3 次)
- 判断收敛的依据是 richness 不再改变
- 计算多次迭代的误差变化,在第三次迭代之后偏差都小于 1%
- 最终用了第三次迭代的输出作为 final cluster catalog
7 Photometric redshift estimation #
在每次迭代的 finder 阶段需要对 cluster 红移进行初始猜测($z_\mathrm{init}$),以给出 richness 和 membership 的估计
之后可以用全部成员星系对 red sequence 进行拟合,得到红移的更精确估计
7.1 的 $z_\mathrm{red}$ 是针对单个星系,而 7.2 的 $z_\lambda$ 是针对 cluster?
7.1 初始红移 #
- 对于 SDSS8 可以用多种方法得到 photo-z,但是具有一定的局限性
- 在 z>0.5 上,photo-z 所需的训练集不足
- 现有的工具一般目标是给出关于星系红移的统计数据,但是我们需要的是单个星系的红移估计
- 开发了自己的红移估计方法 $z_\mathrm{red}$
- 星系的颜色可以转化为 $\chi^2$ 统计量,概率分布和统计量之间的关系是 $P\propto\left(-\frac{1}{2} \chi^2 \right)$
- 不考虑星系的光度吗?
- 还考虑了不同红移上的薄片体积大小不同,应该有 $P\propto \frac{\mathrm{d}V}{\mathrm{d}z}$
- 这个因素类似先验估计,也就是认为星系的体积数密度是恒定的
- 寻找使以上概率最大的红移,即为红移的初始估计
- 误差的估计使用后验分布来进行
- 星系的颜色可以转化为 $\chi^2$ 统计量,概率分布和统计量之间的关系是 $P\propto\left(-\frac{1}{2} \chi^2 \right)$
- Fig 7 展示了这里 $z_\mathrm{red}$ 的效果
- 使用了 training galaxy sample
- 存在一个较小的红移 bias(低估了实际红移)
- 上面计算出的 error 比实际的 error 更大(蓝线比红线高)
- 进行修正:将上面的 offset 补偿给原始的估计
- 感觉有点简陋
- 仍然存在的 residual 是由于 filter transition
7.2 精确的红移估计 #
实际是上述方法的扩展
在每次迭代中用上一次迭代的红移计算 cluster richness 以及 membership,然后用新的 membership 计算新的红移
在后一步中需要用到一个 likelihood;相比之前的 likelihood,这里还加入了协方差矩阵的行列式以及一次 soft cut
这里 w 是一个 soft cut 参数(约定以总 richness 的 70% 作为一个截断的阈值)
最后可以得到 cluster 红移的后验分布,用高斯拟合这个分布以得到红移估计的误差
- 在此基础上还进行了基于训练集的校正,以保证红移的估计是无偏的
- 最后的红移估计结果中存在一些虽然小但是具有较高可信度的偏差(Fig 9)
- 4000A break 切换颜色的效应体现在红移 0.35~0.45 之间,这也比较接近 SDSS8 的测光深度极限
- 一些显著较大的偏差是因为 cluster center 的问题
- 在创建一个 clean sample(14%)之后这些 large offset 消失了(Fig10)
- Fig12 中展示了红移的概率分布
- 适当考虑红移概率分布而非简单的估计值之后,红移估计的分布和光谱红移的分布拟合更好
8 Cluster centering #
为星系团确定中心是重要的,因为错误的中心是测量质量和速度弥散的误差的重要来源
这里假设:cluster 中心都有一个 red, bright&dominant galaxy
- 如果中心星系是 cool-core 的,具有很强的恒星形成,则颜色可能会偏离红色,这是 redMaPPer 的一个已知缺陷
- 对于 group 更常见,而在 cluster 中比例较低
- 这个问题可以通过取消对 BCG 的红色限制条件来解决,但是中心定位的效果会下降
- 另一个方法是用亮度和质量加权平均,但是效果也不好
- 目前的 centering 成功率大概是 85%
8.1 Basic framework #
不去确定中心的位置,而是计算每一个星系成为 cluster 的概率,从而将中心位置的不确定性也纳入统计的考量
(就算用概率应该也是离散的吧?)
- 假设 cluster 中的星系分为三类:Central, satellite, unassociated (前景或者背景)
- 用 filter function 描述三类星系的分布,然后计算星系属于 CG 的 Bayesian 概率
- 还需要考虑到“cluster 只具有一个 CG”的条件
8.2 Centering filters #
介绍三种星系的 filter function 如何定义
- 星系的性质用星等、红移、权重来描述
- 权重用于描述周围星系的密度
- 前面用到的星系性质 vertor $\mathbf{x}$ 都是位置、颜色、星等
- 用红移代替了颜色,因为红移受到的干扰更小
- 用权重替代了位置
- 对于 CG
- 星等用一个 Gaussian 定义,其中星等的均值依赖于红移
- 这里的 $m_\star(z)$ 是 Schechter 函数的参数
- 红移也用一个 Gaussian 定义
- 这里 $z_\mathrm{red}$ 是星系测光红移,而 $z_\lambda$ 是 cluster 红移
- 衡量星系和 cluster 之间的红移差距
- 权重 w 由周围的星系的贡献相加得到
- 对于 richness 和红移不存在依赖
- 同样使用一个 Gaussian filter function
- 星等用一个 Gaussian 定义,其中星等的均值依赖于红移
- 对于 satellite 来说 filter function 基本和 CG 相同,除了——
- 更合适的 weight 参数(为什么 satellite 也要考虑周围的星系密度?)
- 光度函数采用 Schechter function
- 对背景来说,filter function 由平均密度乘角度区域的大小得到
8.3 Implementation #
需要确定以上函数中的参数
用迭代方法同时限制 center 和 red sequence model
8.4 Blue central galaxy #
如果中心星系颜色比较蓝,那么 redMaPPer 会错误地将周围的红色星系作为 CG
一个例子是 Abell 1835
这种情况的比例低于 2%
9 Cluster finder #
大概明白了,也就是 sec 4,5 作为 6 的 ingredient, 而 7,8 作为 9 的 ingredient
前面讨论了一个 finder 的全部组分,现在开始组装
具体的步骤是:
- 估计一个红移 $z_\mathrm{red}$,寻找周围的 over-density
- 计算每一个 over-density 属于 cluster 的概率
- 对星系团进行 percolate
9.1 First pass #
就是先粗略过一遍
- 用非常宽松的条件减少需要检查的星系数量(56m -> 23m)
- 计算潜在 CG 的红移 $z_\mathrm{red}$ 以及 richness $\lambda$,排除 richness 太低的星系
- 这一步拒绝了 60% 的星系
- 基于 7.2 的方法校准更精确的红移
9.2 Likelihood sorting #
基于通过 pass 的星系 catalog 计算 richness,然后计算 lambda likelihood
完整的 likelihood 由 lambda 和 center 两部分组成,后者由 sec8 给出
前一个 likelihood 占据主导地位
9.3 Percolation #
将星系分配给 cluster,同时避免重复计数
具体的过程是:对每一个星系
- 由于 catalog 中已经有被排除的星系,对潜在的 CG 重新计算红移和 richness
- 确定 cluster 中心(sec8)
- 基于新确定的中心重新计算红移和 richness
- 从 catalog 中移除已经被归类到 cluster 中的星系
9.3.1 Masking #
在对 catalog 进行逐一检查的过程中,一个星系属于前面已经检验过的 cluster 的概率会逐渐增加,这会导致星系属于其他 cluster 的概率下降,这体现在后续 cluster 的 richenss 计算过程中
假设一个星系有 0.3 的概率属于前面的一个星系团,它在计算后续排序的时候就只能用 0.7 的概率分配给其他的 cluster
如果 cluster 彼此之间重叠程度很小,以上的修正影响不大
9.3.2 Extent of Clusters and Percolation Radius #
this work 使用了和 richness 相关的 aperture radius
另一个有意义的半径是 percolation radius,这个值和宇宙学参数 $R_\mathrm{200}$ 有关
R12 中研究了 maxBCG catalog,发现 $R_\mathrm{200}\approx1.5R_C(\lambda)$,所以在这里使用了 $1.5R_C(\lambda)$ 作为 percolation radius
9.4 A sample #
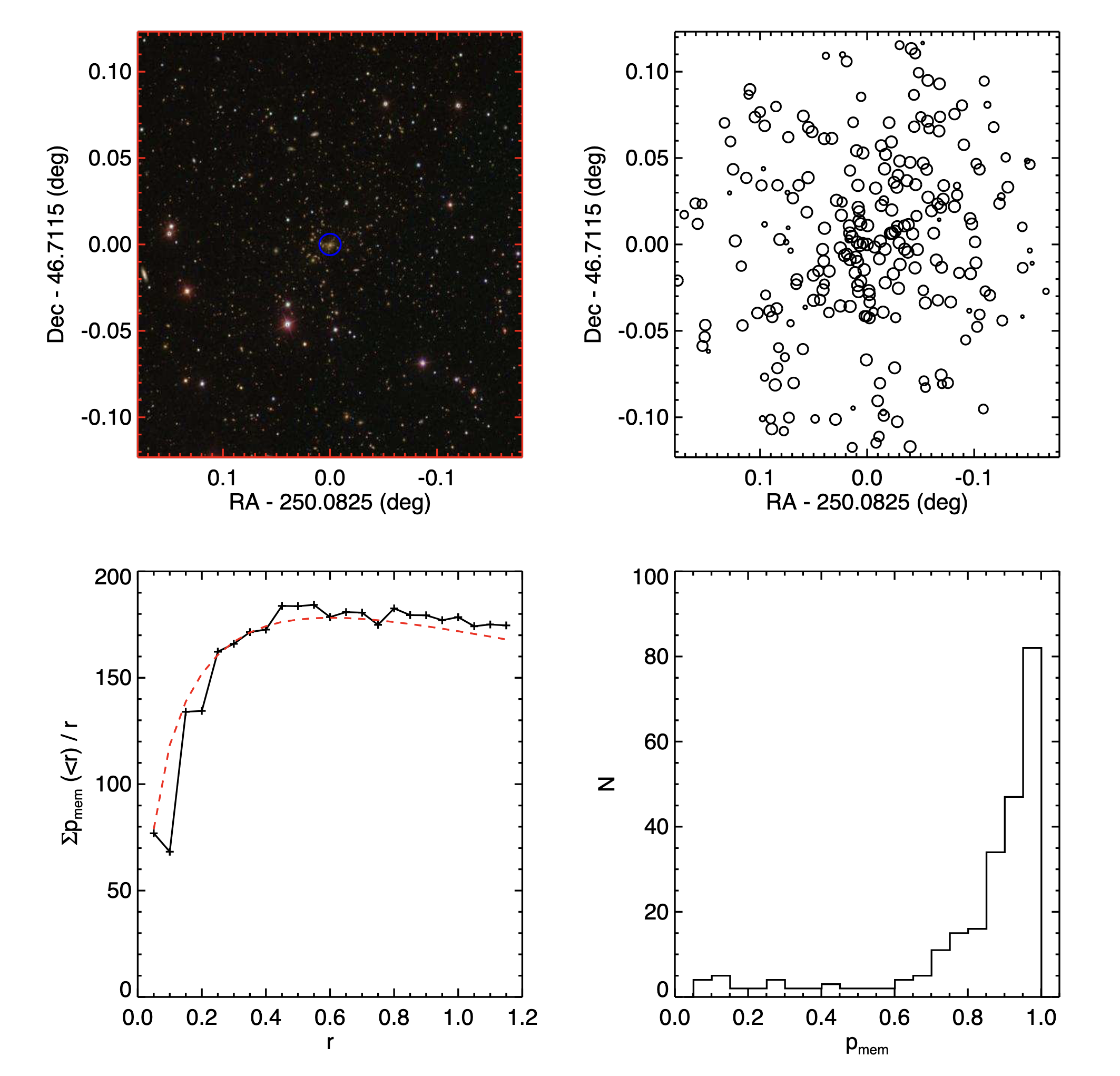
一个 z=0.23 的星系团,这里给出了 SDSS 图像、位置分布、到 cluster 中心的距离、membership probability 的分布
星系密度的分布符合 NFW distribution
10 Catalog #
对 cluster catalog 进行了一些红移、richness 以及 mask fraction 的限制
最终 catalog 包含 25236 个 cluster
在 0.35 以下是 volume limited 的
11 Purity&completeness #
用一些 mock 方法进行检测
12 Cluster masks #
用 mock 探寻 bright star 的影响
可以用 random cluster point 来绘制探测能力 map
cluster mask 和 galaxy mask 之间的差异?
13 Summary #
redMaPPer 在将来可以用于 DES 和 LSST
- richness $\lambda$ 被证明是一种很好的 mass proxy
- redMaPPer 需要训练光谱作为输入,但是需求量不大
- 给出 cluster 的位置的概率分布,适用于统计研究
下一篇 paper 比较了这里的 catalog 和 SZ/X-ray catalog 的区别